Guild of Natural Science Illustrators
The GNSI is a 501(c)(3) that connects, provides professional development & networking opportunities to visual science communicators
Message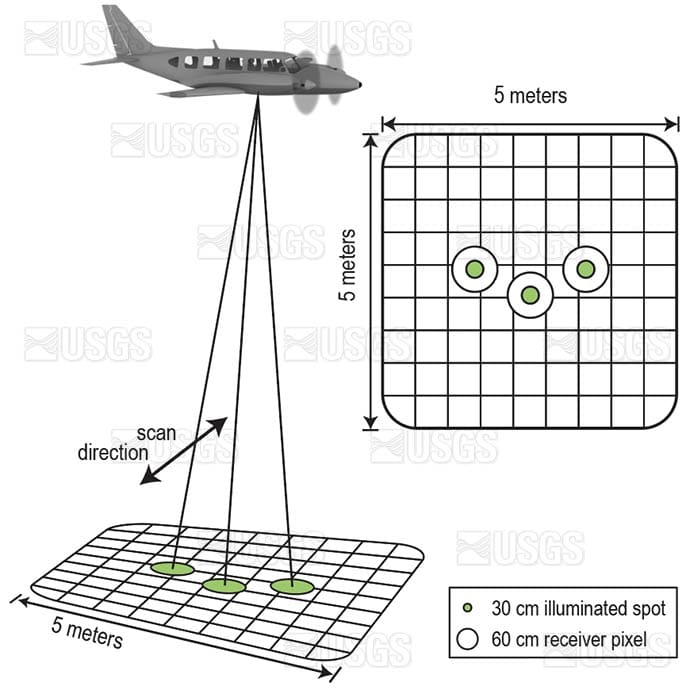
- Betsy Boynton
- Footprint of the EAARL-B lidar receiver
- Vector Art
Figure 1. Footprint of the EAARL-B receiver showing relative size and positions of topobathy-channel fields of view (circles) to deep-channel collection area. Hatched area represents the deep-channel field of view.
Wright, C.W., Kranenburg, C., Battista, T.A., and Parrish, C., 2016, Depth calibration and validation of the Experimental Advanced Airborne Research LIDAR, EAARL-B: Journal of Coastal Research, v. 76, Special issue 1, p. 4–17.